周五参加了世界智能驾驶挑战赛(WIDC) 信息安全挑战赛并通过了预赛,5月中旬将进行线下比拼。一共有 50多只队伍参赛,其中前12名晋级复赛。预赛为线上赛,比赛分为“基础理论”和“实操题” 。赛前根据主办方提供的竞赛范围,做了一些准备,主要是实操题中的车辆信息读取。没想到没用着,实操题做得并不好,没有理解出题人的出题思路,和技术支持聊聊,他说我想的太复杂了,他说考虑到参加的大多是学生,所以难度不会太高。下面简单回顾一下WIDC的预赛,然后记录一下OBD-II标准阅读及理解过程。
预赛回顾

预赛采用线上答题模式。理论环节,半小时时间,由于伙伴有事情不在一块,于是一个人答题,采用双机位监控,实实在在做了一套卷子,有一种回到学生时代的感觉。赛题以选择、判断、填空的形式, 涵盖车辆相关的车载网络安全、无线安全、密码安全、OTA 安全、Web 安全、APP 安全、硬件安全等信息安全理论。实际考了 CAN 的传输距离、RSA 计算、TLS1.2 建立过程等。
实操部分,主要是考察对CAN报文的逆向分析,一共5题。前两题是动作信号分析,通过在页面触发开灯、开门等操作,在抓取的 CAN 报文中找到对应的报文。后面三题目是车辆信息读取 ,抽取车辆里程、故障码、VIN 码、车速、电池电量、车辆状态等 。

开灯,点击三次。下载流量数据包,查找重复 3 次的报文。
{"timestamp":1619168439571,"type":"request","id":0x621,"dlc":8,"data":[0x1,0x1,0x1,0x1,0x1,0x1,0x1,0x1]}
{"timestamp":1619168440559,"type":"request","id":0x621,"dlc":8,"data":[0x1,0x1,0x1,0x1,0x1,0x1,0x1,0x1]}
{"timestamp":1619168441233,"type":"request","id":0x750,"dlc":8,"data":[0x40,0x5,0x30,0x11,0x0,0x80,0x0,0x0]}
{"timestamp":1619168442266,"type":"request","id":0x621,"dlc":8,"data":[0x1,0x1,0x1,0x1,0x1,0x1,0x1,0x1]}
{"timestamp":1619168443103,"type":"request","id":0x750,"dlc":8,"data":[0x40,0x5,0x30,0x11,0x0,0x80,0x0,0x0]}
{"timestamp":1619168444135,"type":"request","id":0x621,"dlc":8,"data":[0x1,0x1,0x1,0x1,0x1,0x1,0x1,0x1]}
{"timestamp":1619168444212,"type":"request","id":0x750,"dlc":8,"data":[0x40,0x5,0x30,0x11,0x0,0x80,0x0,0x0]}
{"timestamp":1619168445242,"type":"request","id":0x621,"dlc":8,"data":[0x1,0x1,0x1,0x1,0x1,0x1,0x1,0x1]}
得到结果 id: 0x750 dlc:8 data:0x40,0x5,0x30,0x11,0x0,0x80,0x0,0x0,最后发送此报文验证一下即可。其他的动作分析同理。
车辆信息读取,看到题目就想到 UDS 和 SAE J1979( ISO 15031-5:2015 ),但是实际测试没有响应。
赛题解析还没出来,先谈谈之前准备的思路。以车速为例。查询车速的 CAN 报文如下。
7DF [8] 02 01 0D 55 55 55 55 55
ECU 收到消息后,回复的报文如下。
7E8 [8] 03 41 0D 32 AA AA AA AA
那么,速度就是32(0x20)Km/h。请求报文是怎么构造的,响应报文该如何解析。之前这类数据一直用诊断仪读,没有手动获取过,乘这次机会学习一下。
标准阅读
之前没有手动分析 OBD-II 的数据,打开英文的标准完全看不懂,现在稍微理清了,记录一下如何阅读 SAE J1979( ISO 15031-5:2015)。标准主要有两部分构成,K线 和 CAN 的诊断服务定义,以下仅讲解 CAN 诊断部分。标准可以分为三个部分,消息格式定义、诊断服务详细定义以及附录。。
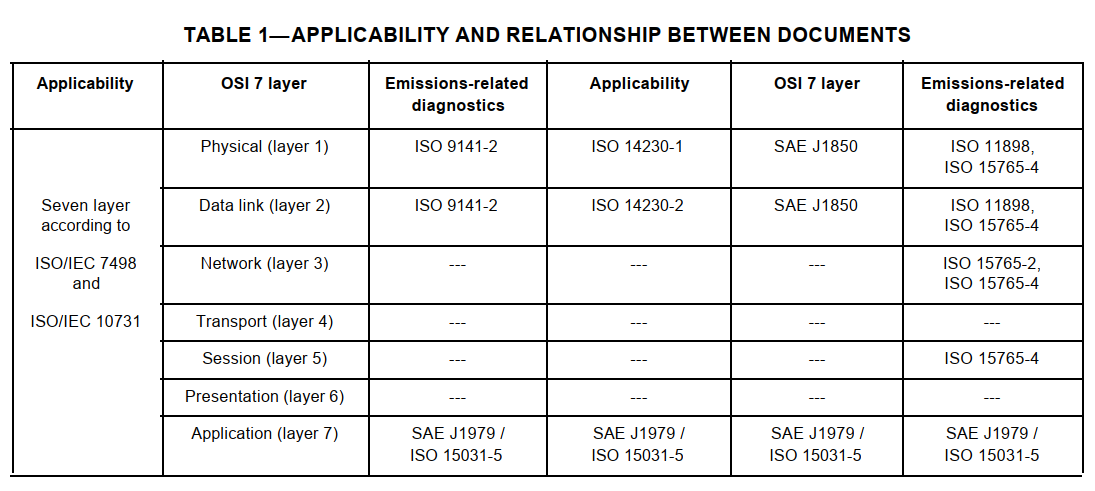
表 1 中结合OSI 七层模型解释了 OBD-II 诊断所采用协议的层级关系,可以看出 SAE J1979 属于应用层协议。
诊断消息格式
标准中定义了请求和响应包的格式。OBD-II 中 CAN 诊断使用 ISO 15765-4 中定义的消息格式。
表6中是请求消息的格式, ISO 15765-4 中的 SID 在 SAE J1979 中是等价的,即OBD-II 的模式(Mode)就是ISO 15765-4 中的SID。
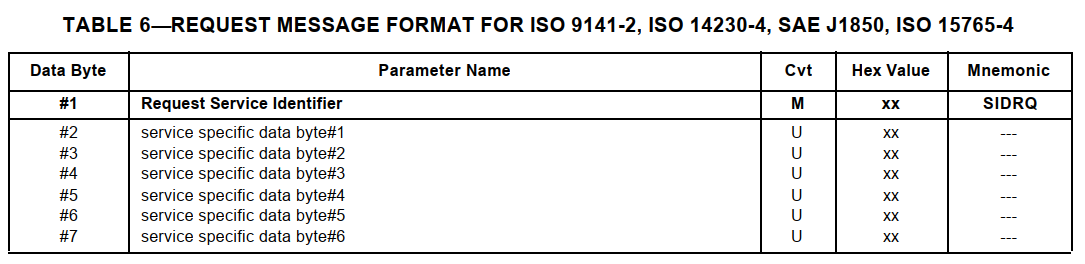
表8 是肯定响应的格式,SID+0x40 为肯定响应。
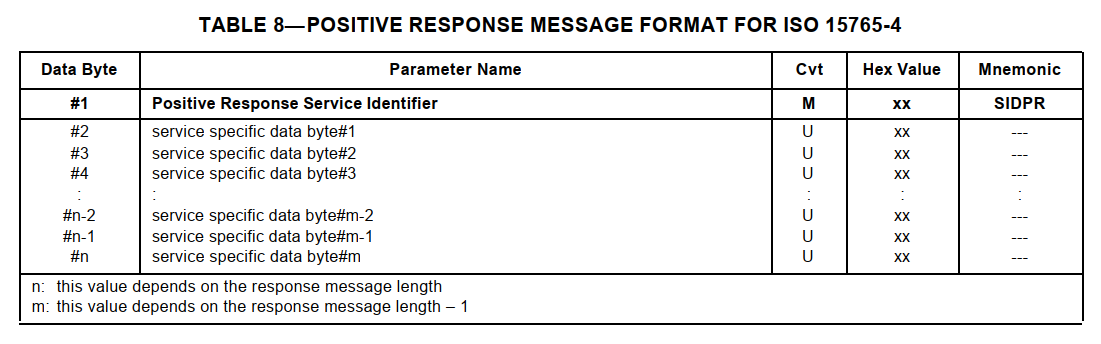
表9是否定响应的格式,否定响应的SID为 0x7F。具体的错误码定义可以标准的表10。

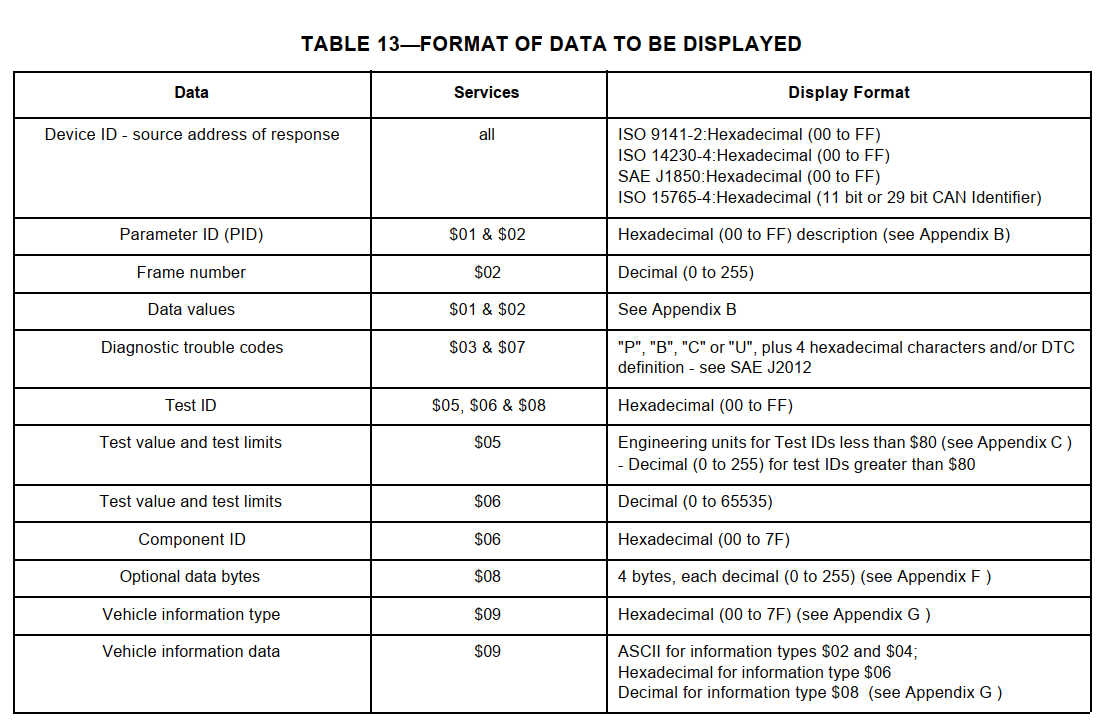
还有一个比较重要的表格(表13),表中列举了数据的格式。有些数据的格式是在其他标准定义的,这里也给出了如具体的标准编号,如 3、7 服务中 DTC(诊断码)参见 SAE J2012。还有正文与附录的关系,如附录B 是 PID 详细定义。
诊断消息定义
诊断消息的第二部分是基于 CAN 总线的诊断消息定义,标准中定义了10个模式,汽车制造商并不需要支持所有的模式,每个制造商也可以自行定义额外的模式,这10种模式如下:
识别动力系统信息并在诊断设备上显示当前可用数据,故障码定义车载测试状态和车辆数据(比如,发动机转速、温度、点火提前角、空气流量、燃油系统的闭环状态、车速、档位、电池电压、油量、油耗、总里程、本次里程等)。
和模式1中的数据相同,但它是在一个故障发生和一个故障码被定义时获得并存储的。模式1中的某些参数识别(PIDs)在该模式中不适用。
相关的故障码由识别故障的5位数编码组成。如果应答信息的数据字节中含多个故障码信息或多个ECU计算机进行应答,则可能产生多个应答信息。
用于清除故障码和冻结帧数据。这将清除所有定义的故障码,包括冻结帧数据和就绪检测器定义的。
该模式显示氧传感器检测页面和收集到的关于氧传感器的测试结果。有9个号码可用于诊断。
1. 01 浓到稀,氧传感器阈值电压;
2. 02 稀到浓,氧传感器阈值电压;
3. 03 转换时间计算时传感器电压低;
4. 04 转换时间计算时传感器电压高;
5. 05 浓到稀切换时间,以ms为单位;
6. 06 稀到浓切换时间,以ms为单位;
7. 07 测试最小电压;
8. 08 测试最大电压;
9. 09 电压转换之间的时间,以ms为单位;
通常有一个最小值,一个最大值,以及每个非连续监测系统的当前值。这项数据是可选项,如果需要,它由车辆制造商来定义。
- 模式07. 请求连续检测系统测试结构(只能在当前或最近的驾驶周期中检测)
在一次驾驶循环进行后,需要来自连续监测系统的故障码(未决)以判断固定问题需要维修。维修技术人员用此来确认是否正确维修且清除了故障码。
这个特殊控制模式需要车载系统,测试,或双向元件(如适合)的控制。这种模式是制造商指定的。
该信息包括存储在车辆发动机控制单元(ECUs)中的车辆VIN码和标定信息。如车厂、型号、品牌、车架号、发动机号等。
在这部分中对每一个模式都进行详细的介绍,包含请求和响应消息的格式,以及每个字段的定义,也给出了实例。下面来看一下模式1 和模式9。
数据流报文(模式1)
读取速度、里程、油量等属于模式1 的动力系诊断数据,读取这些数据通称作读取数据流。
格式定义
消息的传输层使用 ISO-TP 协议。OBD 中 CAN 报文使用 11个字节的CAN ID(通常用3个十六进制表示),数据部分由1个字节的数据长度(bytes)、1个字节的模式(Mode)、1个字节的 PID(PID) 以及 4 个字节的数据组成。
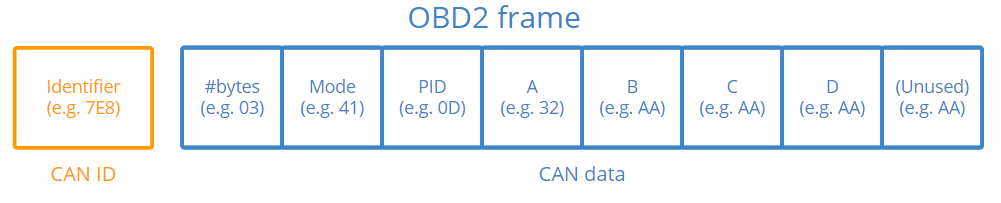
- CAN ID: 在 OBD-II 消息总,请求 CAN ID 为 7DF,响应 CAN ID 在 7E8 到 7EF 之间,7E8 一般是核心 ECU(行车电脑) 响应使用。
- 长度: CAN 数据的长度,从Mode到有效数据结尾的字节数。
- 模式:OBD-II 中定义了 10种模式,取值范围为 0x10xA。响应报文中,会根据请求报文中模式加上 0x40 计算得到响应报文中的模式值。在当前模式下,请求报文中模式的值为 0x1,响应报文汇总模式值为 0x41。
- PID(parameter identification): PID 可以理解为子服务,与 UDS 中的子服务相似,PID 的定义在附录A中 。
- 数据: 4个字节的十六进制数据,响应包中的数据解析需要参考附录B。
查询支持的PID
PID 的范围在 0x000xc0之间,但不是每个ECU都支持每一个PID,使用之前可以通过发送请求查询哪些 PID 可用,格式固定如下表。
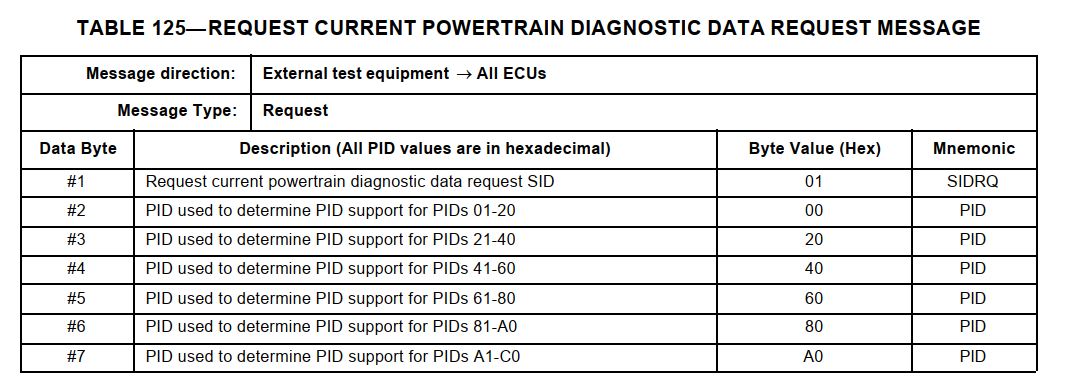
然后 ECU 收到之后,回复报文如下表。支持哪些 PID 需要根据附件 A 进行解析。
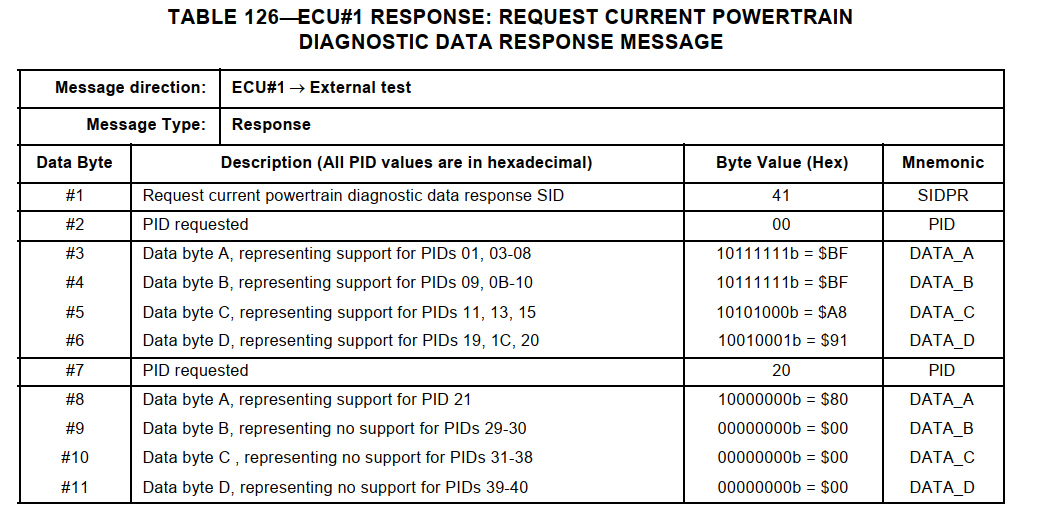
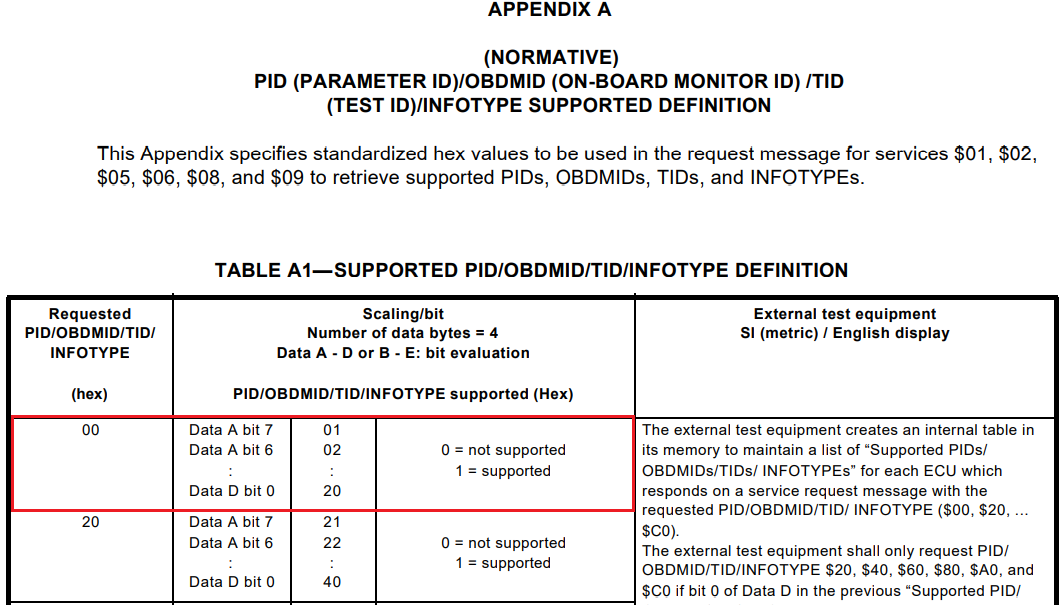
附录 A 中对响应包解析进行了说明。请求报文以每 0x20(32)个 PID 分组查询,响应报文中以 4个字节(32为)数据进行回应,每一个位表示一个 PID 是否支持。
以上表126中的第三个字节为例,10111111b(Data A),属于对 00x20 PID的查询,在表 A1 中找到 PID 为 00的请求的数据行,然后找到 Data A ,依此分析每一位,从高位开始,如果值为 1 ,就表示支持,否则就是不支持。
请求多个 PID
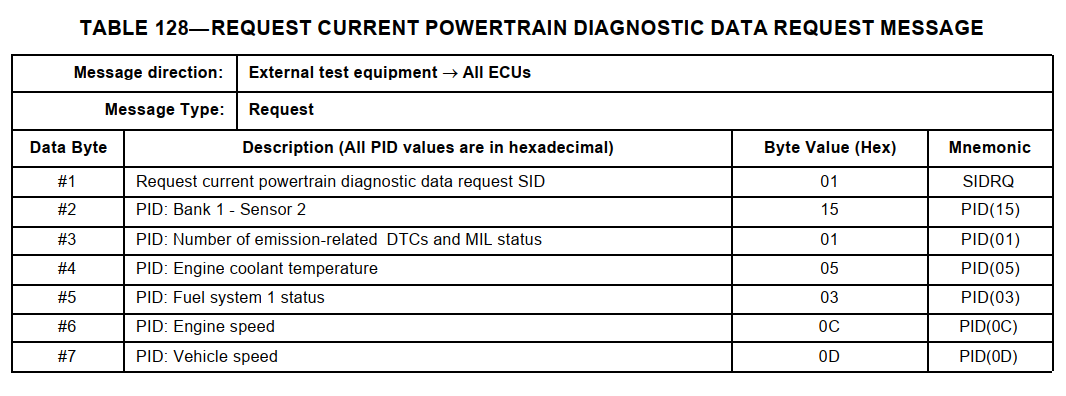
获取到支持的 PID 后,根据 PID 查询数据流,可以多个PID一起查询,当然也可以只查询一个。查询请求格式如下表。
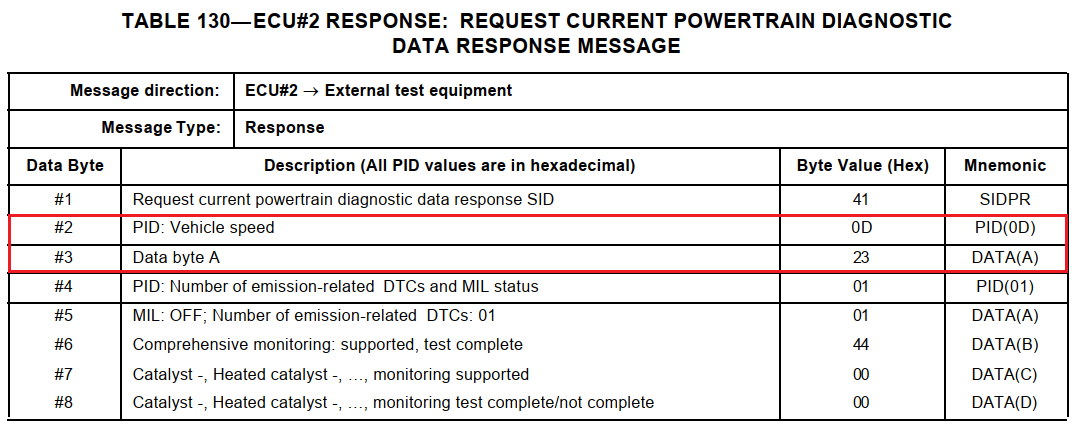
CAN 发送广播消息后,ECU 接收消息,判断是否需要自己处理,如果需要则回复相关的报文。其中 ECU2 回复了车速查询请求等。车速的 PID 为 0x0D,返回的数据为 0x23。关于PID的定义与数据字段的含义需要查询附录B。
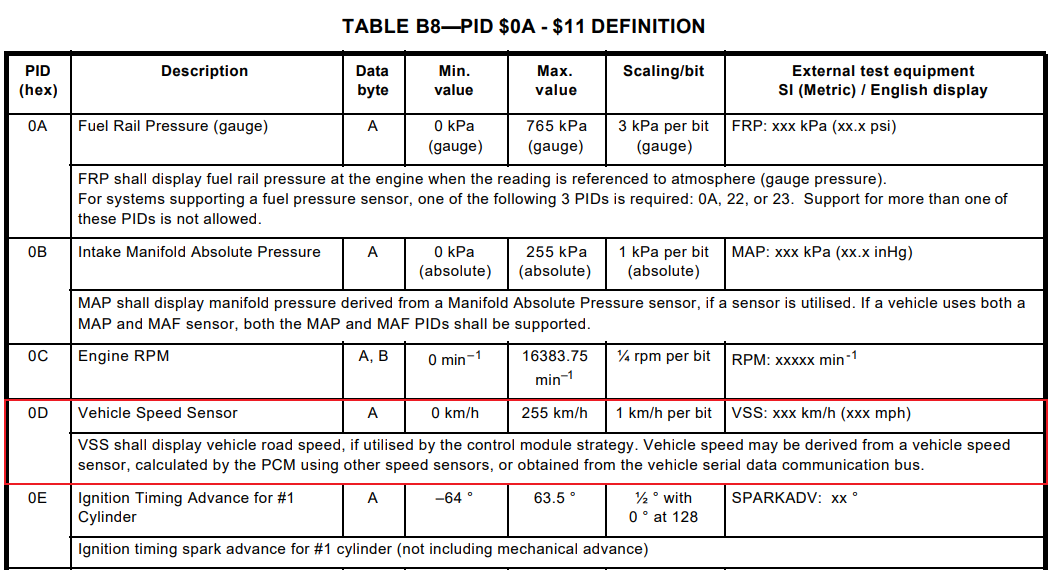
从附录B 中对 PID 0x0D 车速的描述,可以看到数据为只有一个字节A,速度范围在0255km/s。数据字节说明写到,每一个bit代表一个1km/h,上面 ECU 回复数据为 0x23,于是计算出速度为 35km/h。
看到这里兴许有点疑问,消息这些消息为什么只有7个字节,从Byte1Byte7,Byte0 在哪里,这个字节的值是什么。这也是我最初比较疑惑的地方,尝试通过其他标准来理解。之前有了解过 UDS 的结构,就拿来对比。回头看看对应的 OSI 7层模型就豁然开朗了,Byte0 是 ISO-TP 中的数据长度,在这个标准中省略掉了。
手动构造查询请求
还是以获取速度为例,获取速度。其他数据流的查询请求也类似。
1. 首先确定CAN ID,OBD 请求中CAN ID 为 0x7DF;
2. 然后确定模式/SID, 车速为动力总线数据,所以模式/SID为 0x01;
3. 因为模式/SID为 0x01,接下就是 PID,从附录B中找到速度的 PID 值 0x0D;
4. 数据一共有两个字节所以数据长度为 0x02;
5. CAN 的单条数据有 8个字节,使用 0x55 填充剩余的字节;
6. 最后,将报文整合起来,得到 7DF [8] 02 01 0D 55 55 55 55 55。
使用 CAN 卡发送请求后,收到肯定响应报文7E8 [8] 03 41 0D 32 AA AA AA AA,按照附录B 进行解析得到车速 50(0x32)km/s。
其他模式
其他模式的分析方法和上述模式1的相似,并且较少使用附件,看起来相对容易一些。这里值讲解一下 VIN 码获取的部分。
VIN 俗称车架号,一般在驾驶员前侧前挡风玻璃左侧。查询 VIN,属于模式/SID 9(请求车辆信息)。查询 VIN 的消息类型为 0x02,请求报文如下。
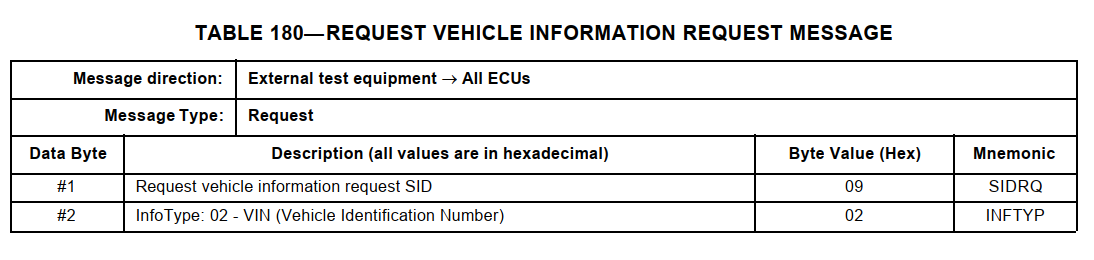
响应报文如下,查询到VIN的个数为1,VIN 的值为 1G1JC5444R7252367。
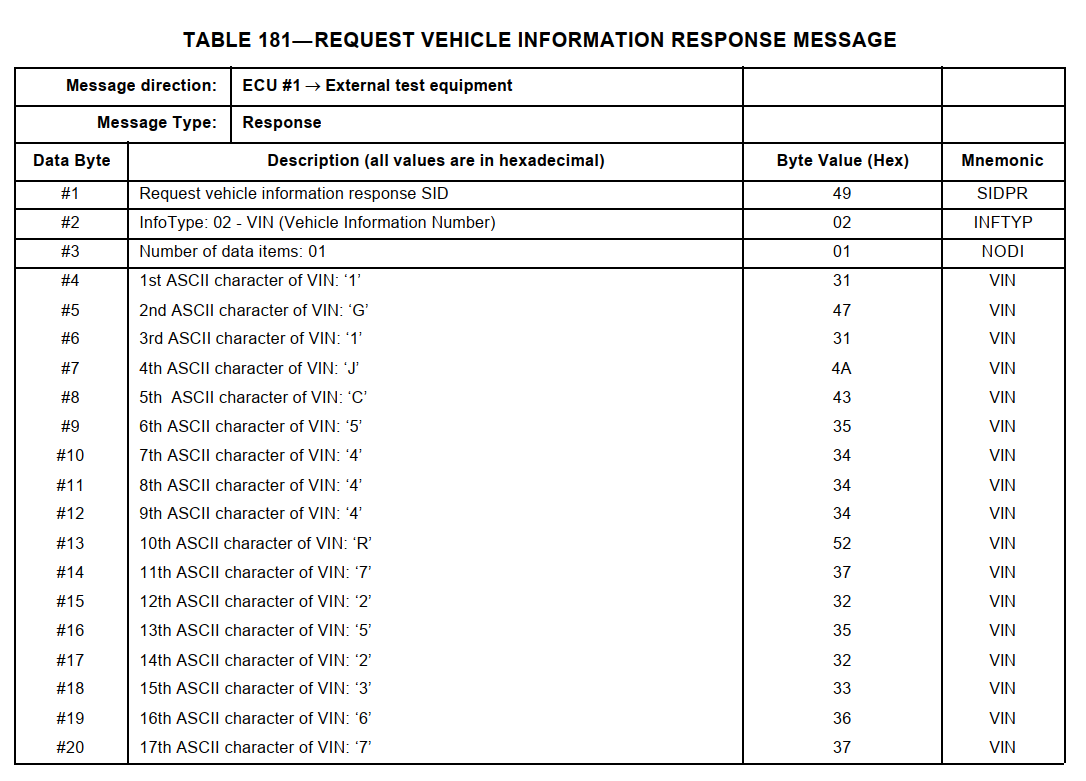
根据上面两个表封装成的CAN 报文如下。
7DF [8] 02 09 02 00 00 00 00 00
7E8 [8] 10 14 49 02 01 31 47 31
7E0 [8] 30 00 00 00 00 00 00 00
7E8 [8] 21 4a 43 35 34 34 34 52
7E8 [8] 22 37 32 35 32 33 36 37
总结
虽然此次为赛前准备的东西没有用上,但是通过这个过程较为深入的学习 OBD-II 诊断协议。由于不是出自汽车领域,对协议细节不是很了解,以前一直依靠于工具获取,不知道具体的字段定义,经过这次的学习,弄清楚了 SAE J1979 标准,还有它与UDS(ISO 14429 的关系),它们的使用场景不同,但有着相似协议结构。也知道了为什么 UDS 的 SID 是从0x10 开始的,是为了兼容 SAE J1979。车联网的通信协议众多,各种协议相互交叉应用,阅读理解起来确实不易,日拱一卒。
参考
本文迁移自知识星球“火线Zone”